1、概述
无人机技术的迅猛发展为建筑物的立面检测与维护带来了革命性的变化。传统的建筑立面检测(玻璃幕墙检测)与维护工作通常需要人工登高、悬垂作业,存在一定的危险性和工作效率低下的问题。而基于无人机的建筑立面检测与维护技术,则能够在保障人员安全的同时,提高工作效率,降低维护成本。本文将介绍基于无人机的建筑立面巡检与维护技术的优势和应用案例。
2、巡检方案
针对传统人工巡检的难点和痛点,睿铂科技的无人机巡检方案具有以下优势:
(1)无人机可以轻松抵达建筑的各个部位,结合数字孪生仿真、全覆盖式巡检,解决人工巡检的遗漏和盲区问题;
(2)高分辨率巡检影像,结合AI识别、人工复核的方式,对于病害点的识别更加准确和全面;
(3)民用无人机市场成熟,学习成本、使用成本和维护成本都很低,且操作简便、部署灵活、作业高效,单人单机即可完成巡检作业;
(4)人机巡检可以通过搭载高清摄像头、红外热像仪等多种传感器设备,对建筑物进行全方位、多角度的巡视和观测。这些传感器可以检测建筑物外观、设备和结构的异常情况,提前预警潜在的问题,有助于及时进行维护;
(5)数字孪生技术结合巡检管理系统,对病害数据进行三维可视化的展示与分析,为科学、高效地管理和运维提供更加准确、更加全面的依据。
方案具体的流程为:第一步,通过建立实景三维模型实现巡检对象的数字孪生;第二步,依据实景三维模型规划巡检航线;第三步,无人机按照巡检航线采集高分辨影像数据;第四步,对影像数据进行定位定姿处理;第五步,AI病害识别;第六步,通过通途智慧巡检管理系统对病害点进行三维可视化的浏览、管理、统计、分析并形成巡检报告。
2.1、数字孪生
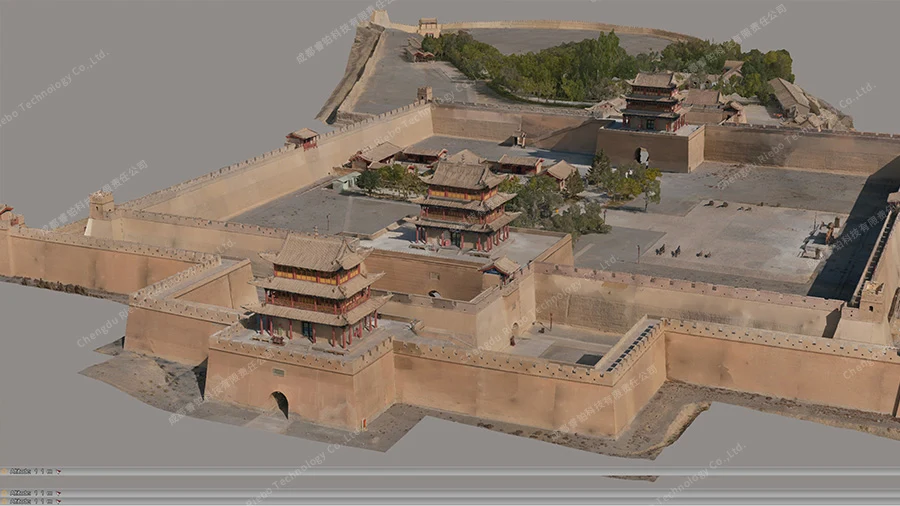
在第一次进行建筑检测时,通过建立实景三维模型实现建筑的数字孪生,还原建筑的真实情况,还原精度可达到厘米级。
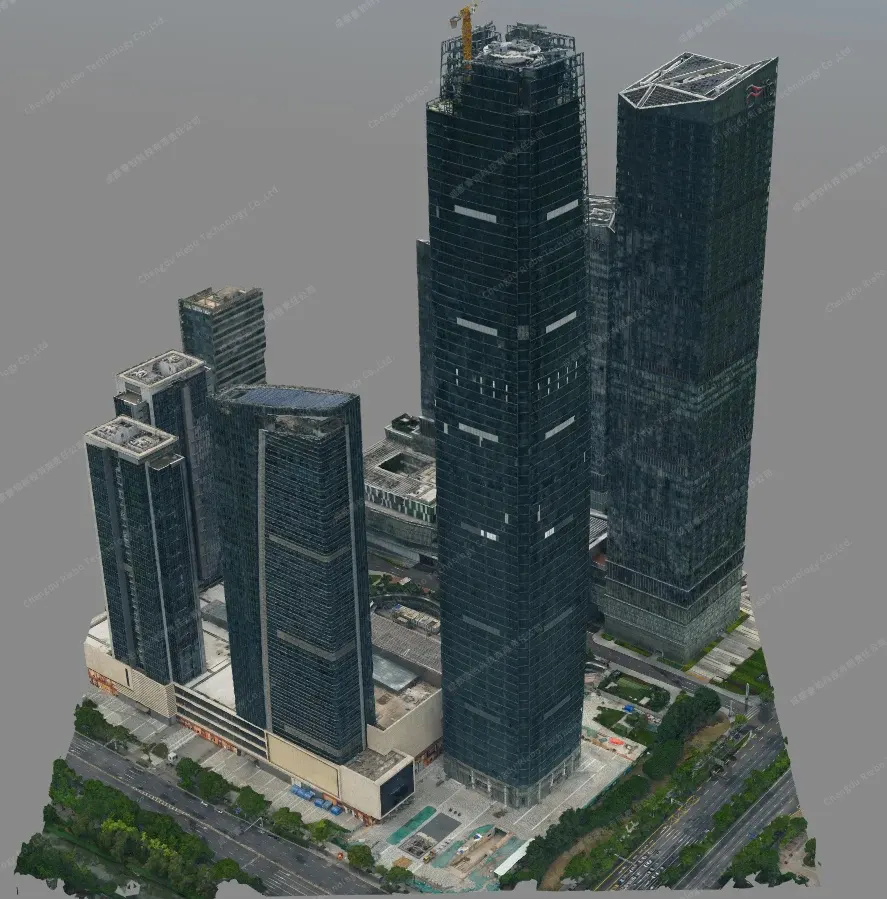
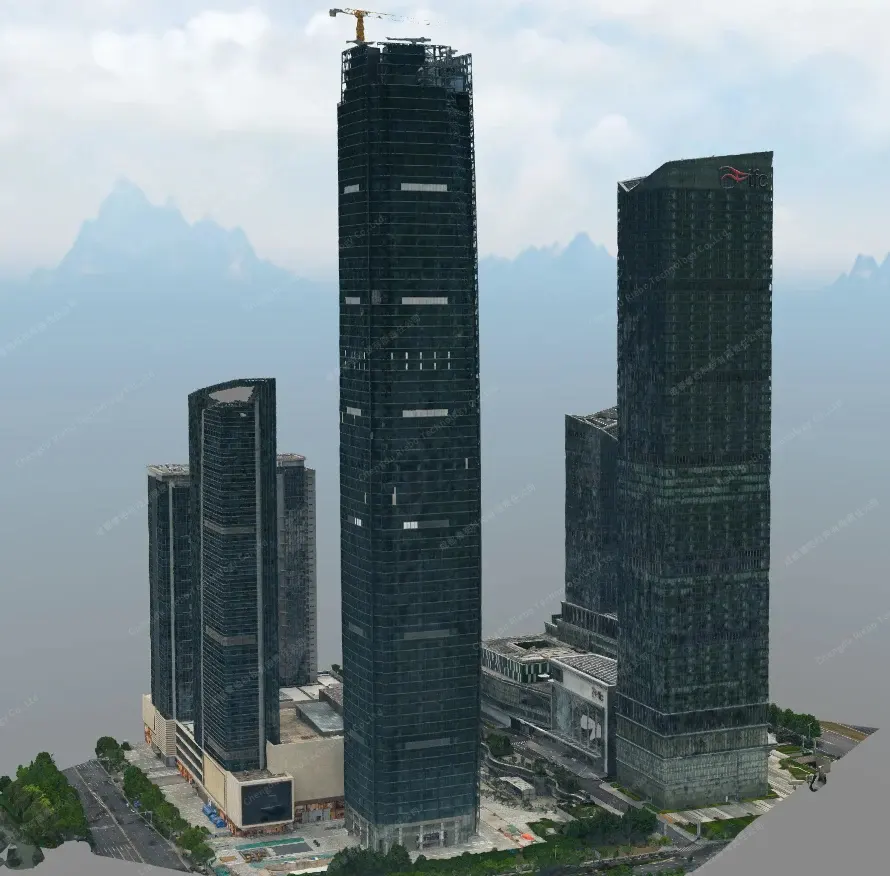
建筑三维实景模型(整体)

建筑三维实景模型(局部)
三维实景模型主要用途有2个:
(1)三维实景模型可以做为病害数据三维可视化管理的数字底图,对于所有已识别的病害,通过模型来进行展示和管理,让运维管理人员可以更加直观地研判建筑的真实情况;
(2)三维实景模型可以做为巡检航线规划的依据,实现无人机全自主飞行。
针对城市建筑的结构和特征,睿铂科技结合自身的技术和经验,选择了旗下D2M倾斜摄影相机,并在自主研发的Riebo Route Assistant(RRA)航线规划软件中设计了巡检模块,专门用于建筑的三维实景建模,在确保空三通过率和模型质量的基础上,大量减少航线和航片数量,从而大幅提高建模效率。

D2M三维建模相机
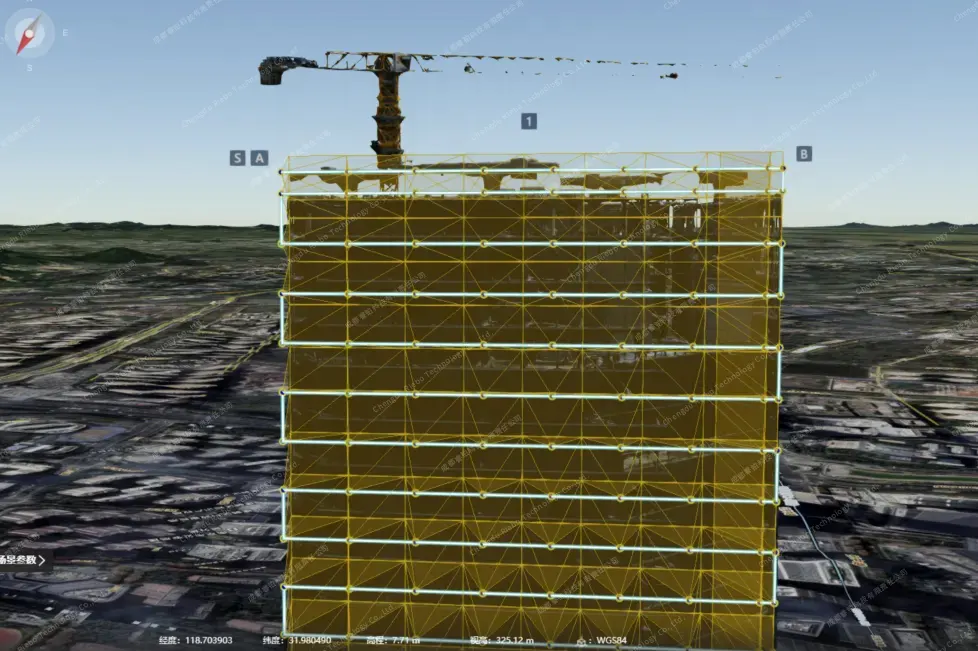
2.2、航线规划
无人机巡检不同于普通的无人机航测作业,根据相关的检测标准巡检时无人机需要贴近检测对象进行摄影,为了保证无人机在复杂环境中的飞行安全,且为了确保影像对检测对象的完整覆盖,因此需要进行航线规划,让无人机按照航线自动完成巡检作业。
Riebo Route Assistant(RRA)航线规划软件中的巡检模块,可以根据实景三维模型自动生成仿真航线,结合上文中的快速建模技术,可以实现对一般场景的首次巡检在一天内完成建模和巡检。

RRA航线规划软件
2.3、数据采集
巡检影像数据采集工作由大疆MAVIC3T无人机完成,外场作业仅需一人、一车和一套采集设备即可完成,并且算法优化后的航线设计搭配长焦距、热成像的专业级巡检相机,作业效率非常高。

热成像巡检

MAVIC3T全自主作业
2.4、数据处理
数据处理使用Skyscanner软件,该软件可以分架次或分批次导出巡检数据,从而实现海量巡检数据的有效化管理。同时,该软件还可以将地理位置信息写入照片中,实现高精度的坐标矫正,并根据无人机和相机的姿态信息,解算出影像的视场域,为后续病害点的精准定位提供数据支撑。
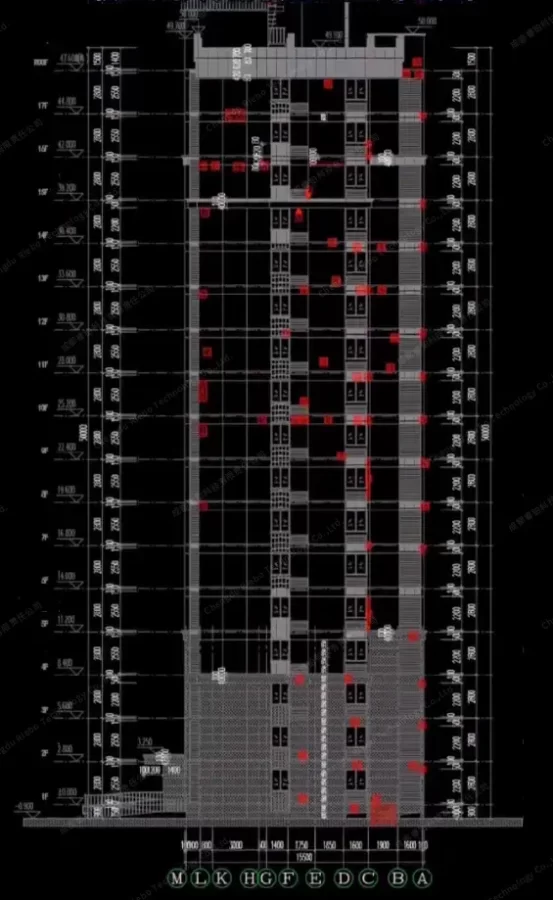
2.5、AI识别
随着基于卷积神经网络深度学习的图像识别算法的进步,使用高分辨率巡检影像进行病害点人工智能识别的技术应用也更加容易和成熟。具体的工作流程如下:
第一步:通过对采集图片数据进行标记并交付给卷积神经网络模型进行训练。训练后的神经网络模型可快速地对图片进行裂缝识别检测,后期通过完善模型和采集更多训练数据来共同提高模型的识别率。
第二步:针对已经识别出缺陷的图片,进行增强、去噪、图像分割、边缘检测等一系列处理,得到建筑立面裂缝分割效果图和裂缝像素级的测量结果。采用基于深度学习的优化分割算法,裂缝像素级重叠率高,并且能够在细小裂纹、复杂背景、人为标识等干扰情况下给出正确的分割结果。
同时针对建筑立面的其余缺陷,如幕墙变形开裂、锈蚀、螺栓松动、脱空等情况也进行识别。

AI识别(整体)
-1024x528.webp)
AI识别(局部)
2.6、巡检管理
目前,大部分的检测作业最终形成的成果为检测报告,无论是从具体的病害,还是建筑的整体情况,其呈现方式均不直观。并且,巡检流程缺乏有效的数字化管理,巡检成果的可重复利用率低,巡检过程的监督检查困难,现有的部分巡检作业软件也存在集成化程度低、数据成果不通用的问题。
为此,睿铂科技开发了通途智慧巡检管理系统,将巡检全流程进行数字化一站式管理,集成了人员管理、数据管理、病害识别、病害定位、病害三维可视化管理、历史病害对比、数据统计分析、巡检报告定制化输出等功能。

通途智慧巡检管理系统
3、巡检系统
整个系统由采集系统和管理系统2个子系统组成。其中:采集系统由无人机平台、建模相机、巡检相机、航线规划软件和数据处理软件构成;管理系统为通途智慧巡检管理系统。
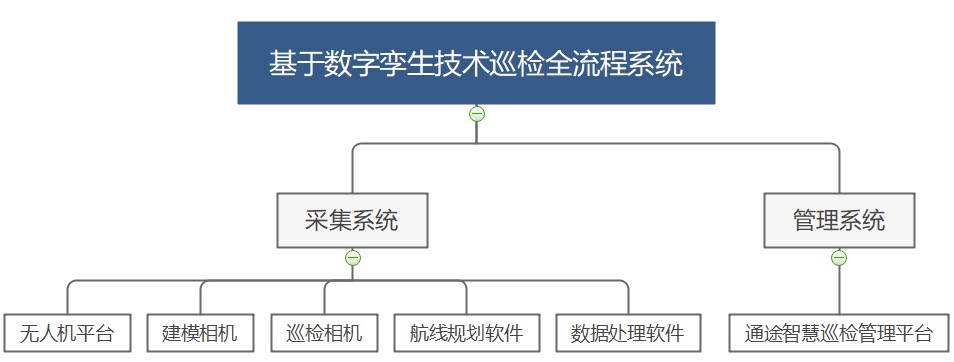
巡检系统
3.1、采集系统
采集系统主要通过无人机平台搭载云台相机,配合相应软件,完成对巡检对象的高精度位置信息、高分辨率影像数据和各构件病害数据的采集。系统包括:
(1)无人机平台
无人机平台为大疆M300RTK多旋翼无人机。该款无人机内置了RTK模块,支持自定义网络RTK,可以实现高精度准确定位。其飞行稳定的特点,六向环境感知和避障能力非常适合建筑巡检的复杂环境。

MAVIC3T无人机
(2)航线规划软件
Riebo Route Assistant(RRA)是睿铂自研的一款航线规划软件,除了支持睿铂全系列设备的网格、环绕、仿地、立面四大类航线规划功能外,还支持自主导入DEM高程文件并自动识别高程类型,以及三维模型一键导入并自动对齐底图地物的功能。
RRA的巡检模块,支持依据三维实景模型自动生成巡检航线,航线各项参数均可调节,在保障飞行安全的基础上,实现对巡检对象的全覆盖、无遗漏。通过算法优化的航线设计,还能大量减少冗余数据,为后续处理工作节省时间。
RRA航线规划软件
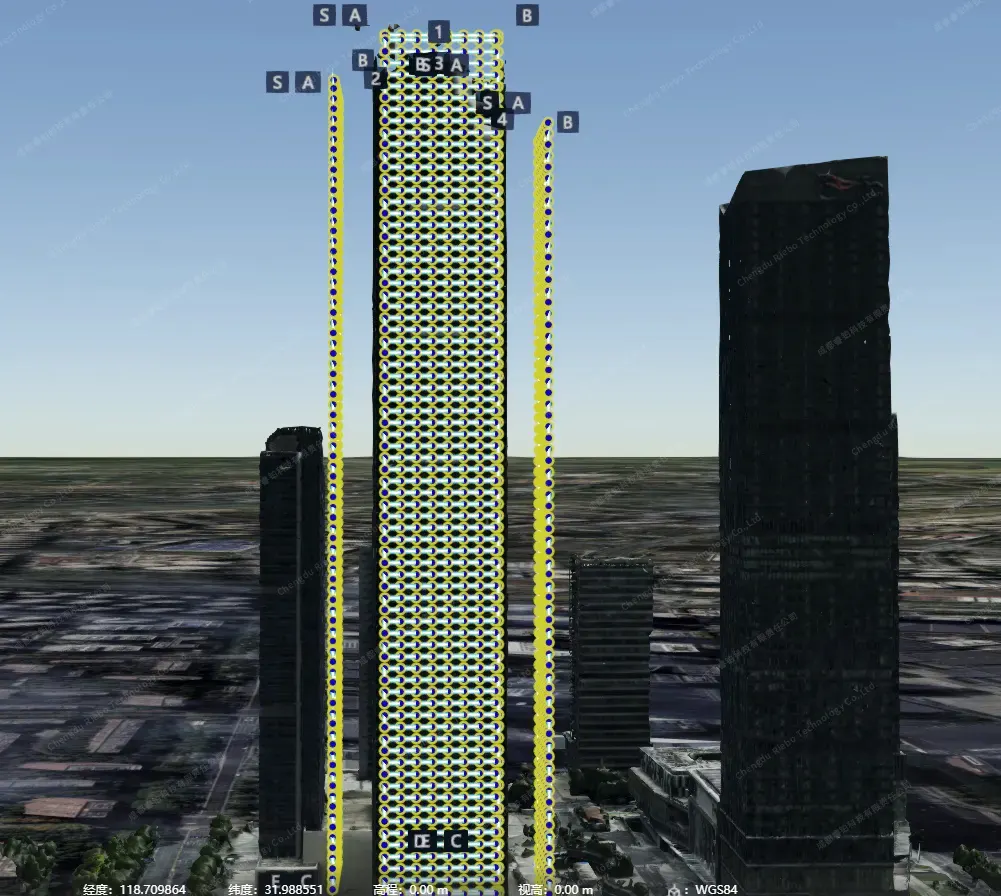
依据模型生成巡检航线
(3)数据处理软件
数据预处理使用Skyscanner软件,软件支持自动架次分组的数据管理功能,支持通过标定参数,将位置信息精准矫正至相机cmos中心并写入照片,并且支持结合相机畸变参数和拍照时的姿态信息,精确计算照片的视场域,为后续病害点的精准定位与测量提供数据支撑。

Skyscanner
3.2、管理平台
通途智慧巡检管理系统(ASIS)是睿铂为巡检全流程一站式管理开发的管理系统,系统由人员管理模块、项目管理模块、巡检管理模块、病害管理模块组成。用户可以将无人机巡检数据和三维模型上传至平台,系统自动将模型与照片映射关联。通过AI或手动对照片上的病害进行标记,系统会自动将病害位置孪生至三维模型,在三维模型上可以直观全面的浏览巡检目标的病害分布和病害信息。系统可以一键输出专业的巡检报告,完成巡检的全流程闭环。
巡检报告
4、巡检行业发展趋势
随着大数据、移动互联网、人工智能、无人机等技术的不断发展,国家高度重视新技术在建筑领域应用和融合创新,=在国家战 略的引领下,部级及省级部门对人工智能、自动驾驶、无人机等技术在交通运输中的应用提出了发展目标和指导意见,地方政府也相继发文引导此类课题研究与应用推广,国家政策导向和地方政府的务实推进,将大力推动无人机技术在公路巡检监测中的应用,提高公路养护效率、安全保障和服务水平,推进巡检现代化,并催生巨大的经济效益。